Hardware
UltiBot usa una arquitectura de doble microcontrolador: un STM32F4 como cerebro
principal (estrategia, sensores, menú) y un STM32F1 como controlador de motores
(FOC). Ambos se comunican por USART a 115200 baudios.
Microcontroladores
Placa Principal — STM32F401CCU6 (BlackPill)
| Característica |
Detalle |
| Modelo |
STM32F401CCU6 |
| Arquitectura |
ARM Cortex-M4F (con FPU) |
| Frecuencia |
84 MHz (HSE 25 MHz → PLL) |
| Flash |
256 KiB (128 KiB utilizables en el linker) |
| RAM |
64 KiB |
| Framework |
libopencm3 |
| Debug |
ST-Link (SWD) |
Placa FOC — STM32F103C8T6 (BluePill)
| Característica |
Detalle |
| Modelo |
STM32F103C8T6 |
| Arquitectura |
ARM Cortex-M3 |
| Frecuencia |
72 MHz (HSE 8 MHz → PLL) |
| Flash |
64 KiB |
| RAM |
20 KiB |
| Framework |
libopencm3 |
Nota: La placa FOC tiene su propia documentación en
OPRcontrolFOC.
Sensores
SHARP GP2Y0E03 — Distancia IR (6 unidades)
| Característica |
Detalle |
| Modelo |
SHARP GP2Y0E03 |
| Tipo |
Infrarrojo por triangulación |
| Salida |
Analógica (0–3.3V) |
| Interfaz |
ADC 12-bit (PA0–PA5) |
| Filtro |
Media móvil 20 muestras |
| Cantidad |
6 (2 frontales, 2 angulados, 2 laterales) |
QRE1113 — Sensores de línea (2 unidades)
| Característica |
Detalle |
| Modelo |
QRE1113 |
| Tipo |
Reflectivo IR |
| Salida |
Analógica |
| Interfaz |
ADC 12-bit (PA6–PA7) |
| Cantidad |
2 (izquierdo y derecho) |
Disposición de sensores
| Sensor |
ID |
Canal ADC |
GPIO |
Función |
| Línea izquierda |
SENSOR_LINE_LEFT (0) |
CH7 |
PA7 |
Detección borde dohyo |
| Izquierda |
SENSOR_LEFT (1) |
CH6 |
PA6 |
Rival lateral izq. |
| Ángulo izquierda |
SENSOR_ANGLE_LEFT (2) |
CH3 |
PA3 |
Rival diagonal izq. |
| Frontal izquierda |
SENSOR_FRONT_LEFT (3) |
CH5 |
PA5 |
Rival frontal izq. |
| Frontal derecha |
SENSOR_FRONT_RIGHT (4) |
CH2 |
PA2 |
Rival frontal der. |
| Ángulo derecha |
SENSOR_ANGLE_RIGHT (5) |
CH4 |
PA4 |
Rival diagonal der. |
| Derecha |
SENSOR_RIGHT (6) |
CH1 |
PA1 |
Rival lateral der. |
| Línea derecha |
SENSOR_LINE_RIGHT (7) |
CH0 |
PA0 |
Detección borde dohyo |
Actuadores
Motores Brushless
| Característica |
Detalle |
| Modelo |
Gimbal 12V 80T |
| Tipo |
Brushless DC (BLDC) |
| Driver |
SimpleFOCMini (MOSFET trifásico) |
| Control |
FOC sinusoidal con PI de velocidad |
| Frecuencia PWM |
~28.125 kHz |
| Resolución PWM |
512 niveles |
Más detalles del control FOC en Control y en la
documentación de OPRcontrolFOC.
Alimentación
| Característica |
Detalle |
| Batería |
2× LiPo 3S (~11.1V nominal) |
| Capacidad |
~180 mAh cada una |
| Regulador |
Mini360 (step-down) |
| Monitorización |
No implementada en firmware |
⚠️ Advertencia: El firmware no monitoriza el voltaje de batería. No hay
protección por batería baja. Ver BL-01.
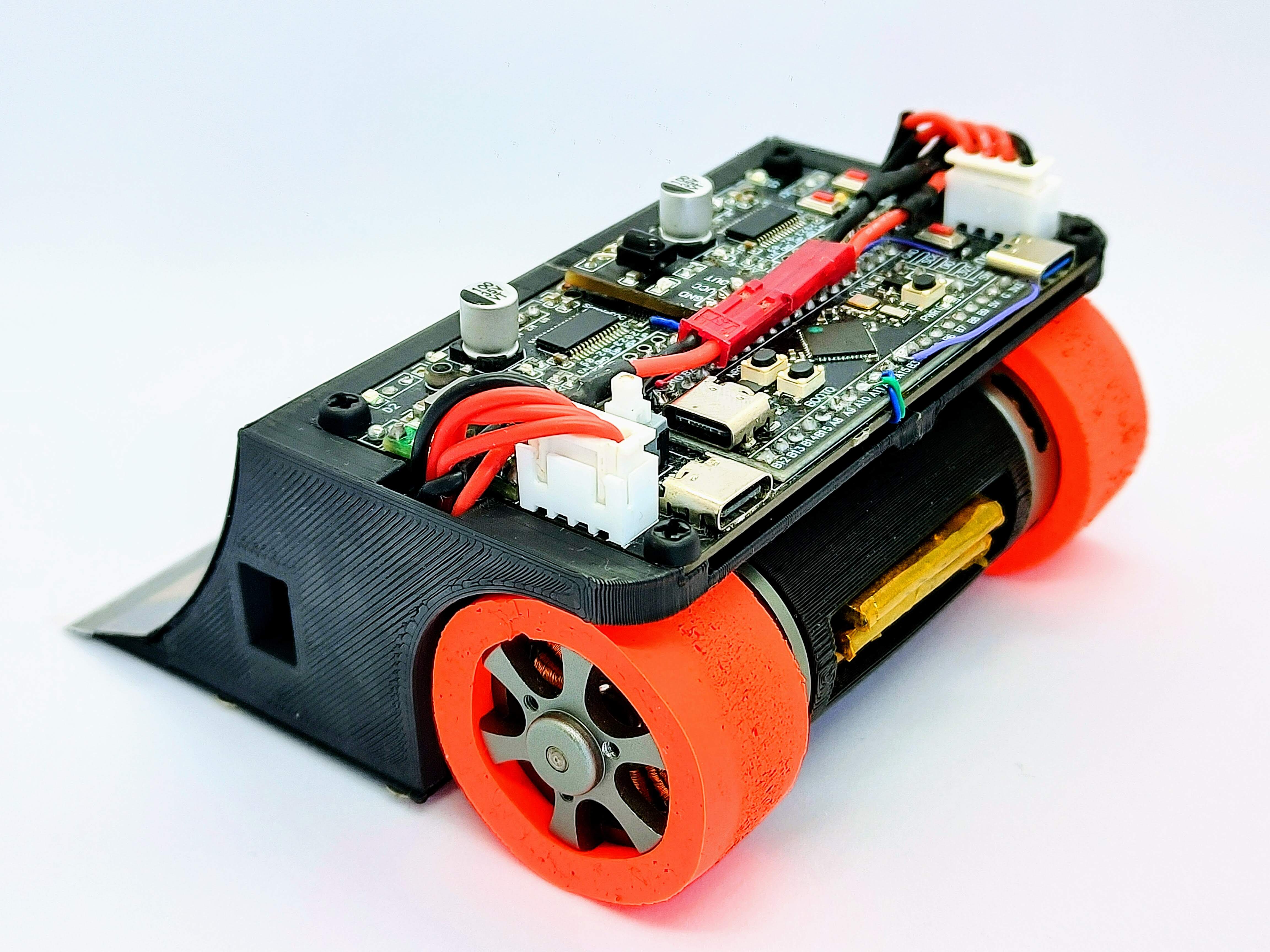
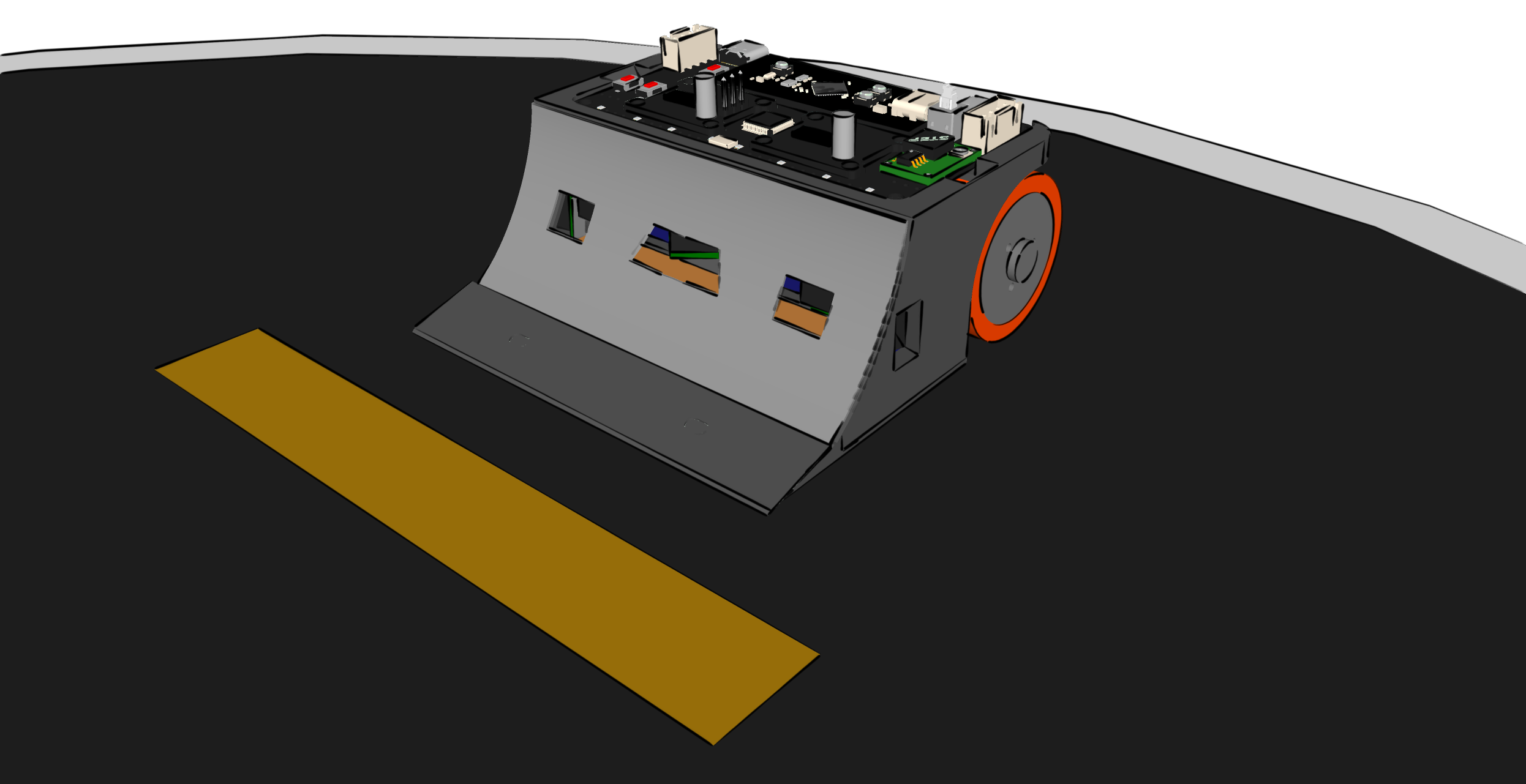
Chasis
| Característica |
Detalle |
| Material |
PLA |
| Fabricación |
Impresión 3D |
| Ruedas |
JSUMO JS2622 |
| Modelo 3D |
SketchUp + 14 archivos STL |
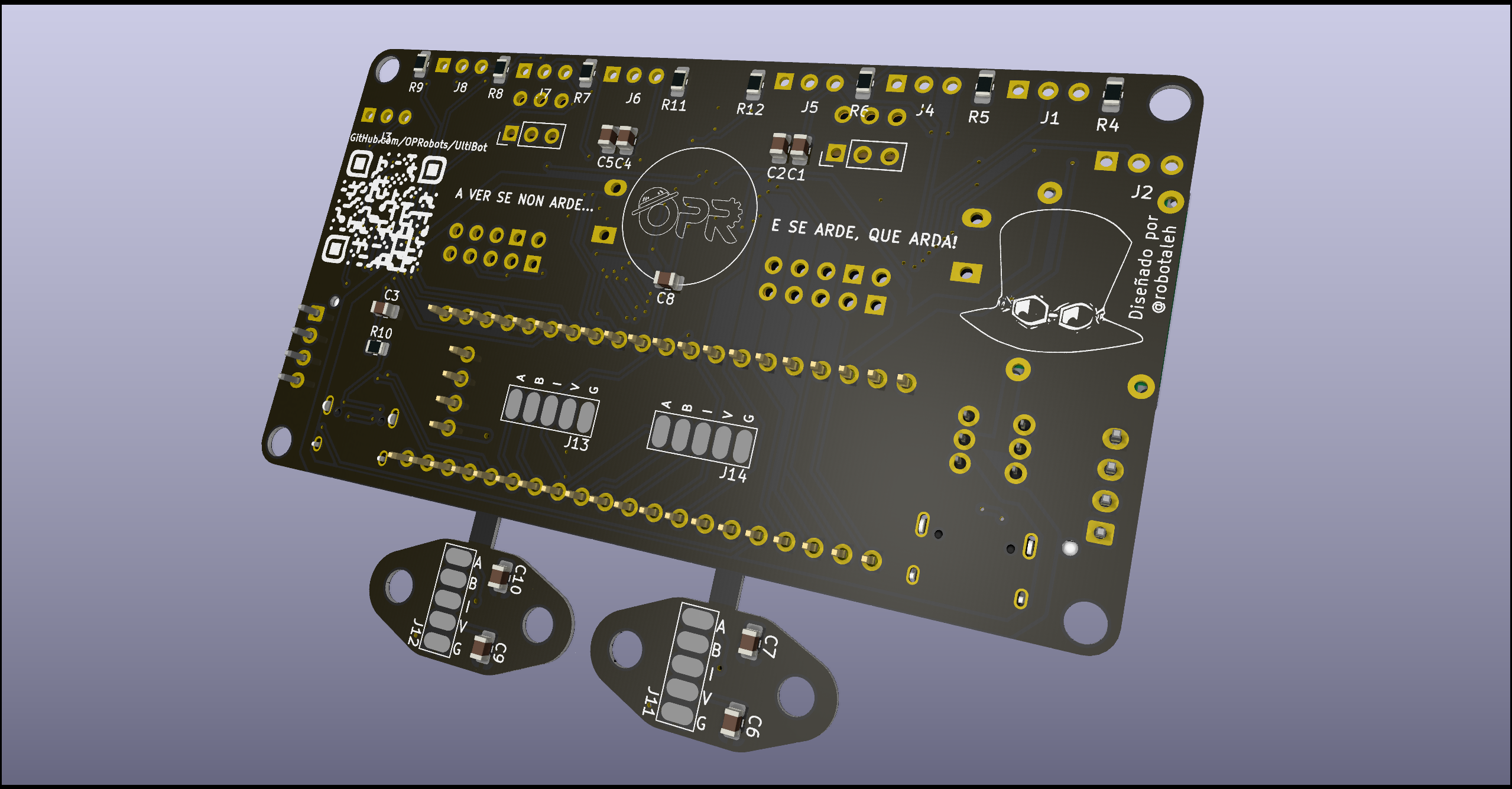
PCB
| Característica |
Detalle |
| Herramienta |
KiCad 7 |
| Capas |
2 (F.Cu + B.Cu) |
| Grosor |
0.57 mm total |
| Acabado |
HASL lead-free |
| Máscara |
Verde |
| Serigrafía |
Blanca |
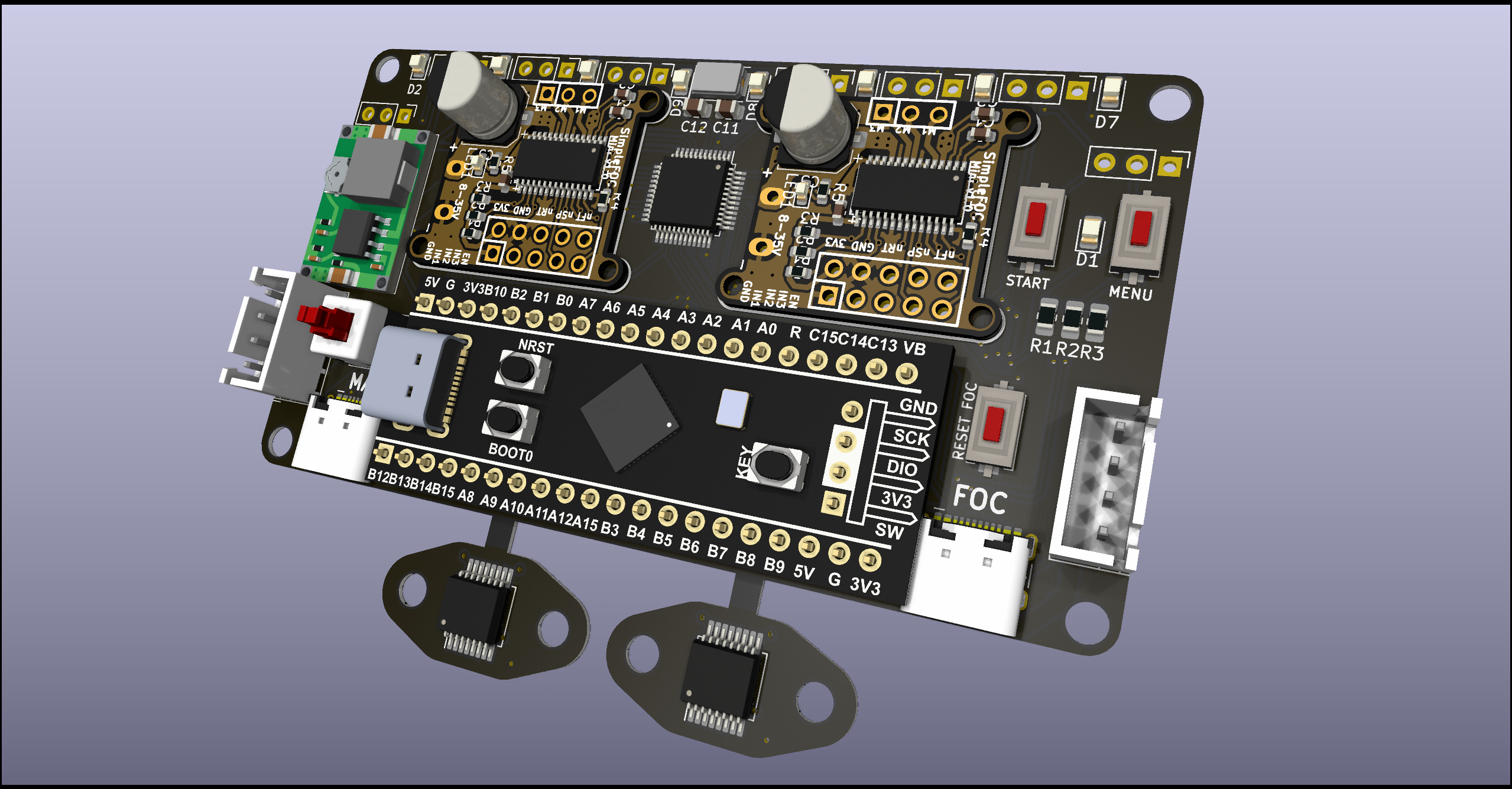
Pinout — STM32F401CCU6
GPIOs — LEDs y botones
| Pin |
Periférico |
Función |
| PA8 |
GPIO OUT |
LED de menú |
| PB1 |
GPIO OUT |
LED sensor frontal izq. |
| PB2 |
GPIO OUT |
LED sensor ángulo izq. |
| PB10 |
GPIO OUT |
LED sensor izquierda |
| PC13 |
GPIO OUT |
LED sensor derecha |
| PC14 |
GPIO OUT |
LED sensor ángulo der. |
| PC15 |
GPIO OUT |
LED sensor frontal der. |
| PB8 |
GPIO IN (pull-up) |
Botón de inicio |
| PB9 |
GPIO IN (pull-up) |
Botón de menú |
ADC1 — Sensores
| Pin |
Canal |
Sensor |
| PA0 |
CH0 |
Línea derecha |
| PA1 |
CH1 |
Derecha |
| PA2 |
CH2 |
Frontal derecha |
| PA3 |
CH3 |
Ángulo izquierda |
| PA4 |
CH4 |
Ángulo derecha |
| PA5 |
CH5 |
Frontal izquierda |
| PA6 |
CH6 |
Izquierda |
| PA7 |
CH7 |
Línea izquierda |
USART
| Pin |
Periférico |
Función |
| PA9 (AF7) |
USART1 TX |
Consola debug |
| PA10 (AF7) |
USART1 RX |
Consola debug |
| PA11 (AF8) |
USART6 TX |
Comunicación FOC |
| PA12 (AF8) |
USART6 RX |
Comunicación FOC |
RC5 (IR Remote)
| Pin |
Periférico |
Función |
| PB3 |
EXTI3 |
Receptor IR RC5 |
Diagrama de Bloques
flowchart TD
subgraph Main["Placa Principal (STM32F401CC)"]
MCU[STM32F401CCU6<br/>84 MHz]
ADC[ADC1 12-bit<br/>8 canales]
DMA[DMA2 Stream0<br/>Circular]
end
subgraph FOC["Placa FOC (STM32F103C8)"]
MCU2[STM32F103C8T6<br/>72 MHz]
PWM[PWM trifásico<br/>TIM1 + TIM2]
ENC[Encoders cuadratura<br/>TIM3 + TIM4]
end
subgraph Sensores
IR[6× SHARP GP2Y0E03]
LINE[2× QRE1113]
end
subgraph Actuadores
M1[Motor izq.<br/>Gimbal 12V]
M2[Motor der.<br/>Gimbal 12V]
D1[SimpleFOCMini]
D2[SimpleFOCMini]
end
IR -->|PA0-PA5| ADC
LINE -->|PA6-PA7| ADC
ADC -->|DMA| MCU
MCU -->|USART6 115200| MCU2
MCU2 -->|TIM1 PWM| D1
MCU2 -->|TIM2 PWM| D2
D1 --> M1
D2 --> M2
M1 -->|Encoder| ENC
M2 -->|Encoder| ENC
ENC --> MCU2
RC5[IR Remote RC5] -->|PB3 EXTI| MCU
USB[USB-Serial] -->|USART1| MCU
Documento generado el 2026-06-30. Ver también Arquitectura Software, Sensores, Control.