FujitoraBot2
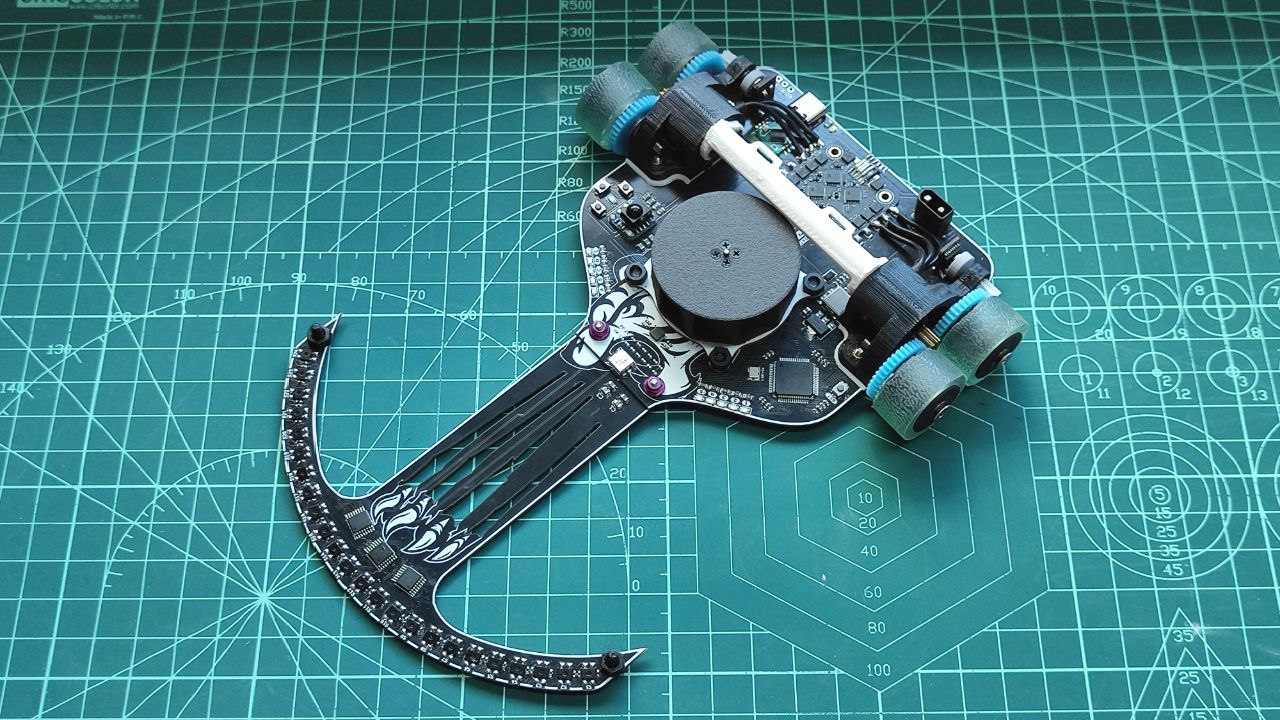
Versión 2 de FujitoraBot, renovando el hardware después de 5 años: más rápido,
con 24 sensores de línea, giroscopio MPU-6500 y diseño más modular. Robot
micromouse de competición orientado al seguimiento de línea de alta velocidad.
🏆 Palmarés
| Competición |
Resultado |
Fecha |
| — |
— |
— |
⚙️ Hardware
| Característica |
Detalle |
| Microcontrolador |
STM32F405RGT6 @ 168 MHz |
| Sensores |
24 sensores IR de línea + MPU-6500 (giroscopio 3 ejes) |
| Motores |
2× DC con ESC BLHeli (OneShot125) + ventilador |
| Encoders |
2× encoders magnéticos en cuadratura |
| Batería |
LiPo 2S/3S con divisor de tensión y detección automática |
| Chasis |
Diseño propio en 3D (SketchUp + STL) + PCB KiCad |
💻 Software
| Componente |
Detalle |
| Framework |
LibOpenCM3 |
| Frecuencia control |
1000 Hz (TIM5) |
| Algoritmo |
PID en cascada: velocidad lineal + corrección angular (giro + sensores) |
| Debug |
USART3 @ 115200 baud + MacroArray para telemetría |
📚 Documentación
🔧 Stack Tecnológico
| Componente |
Detalle |
| MCU |
STM32F405RGT6 @ 168 MHz (ARM Cortex-M4F) |
| Framework |
LibOpenCM3 + PlatformIO |
| Lenguaje |
C11 |
| Compilador |
GCC ARM Embedded (arm-none-eabi-gcc) |
| IDE |
VSCode |
🎥 Vídeos
Documento generado el 2026-06-25. Ver también Hardware.