Hardware
El sistema IRStart se compone de dos dispositivos independientes: un mando (Remote) basado en ESP32-C3 que emite señales infrarrojas con múltiples protocolos, y un módulo (Module) basado en ATtiny que las recibe y actúa como señal de arranque/parada para robots de competición.
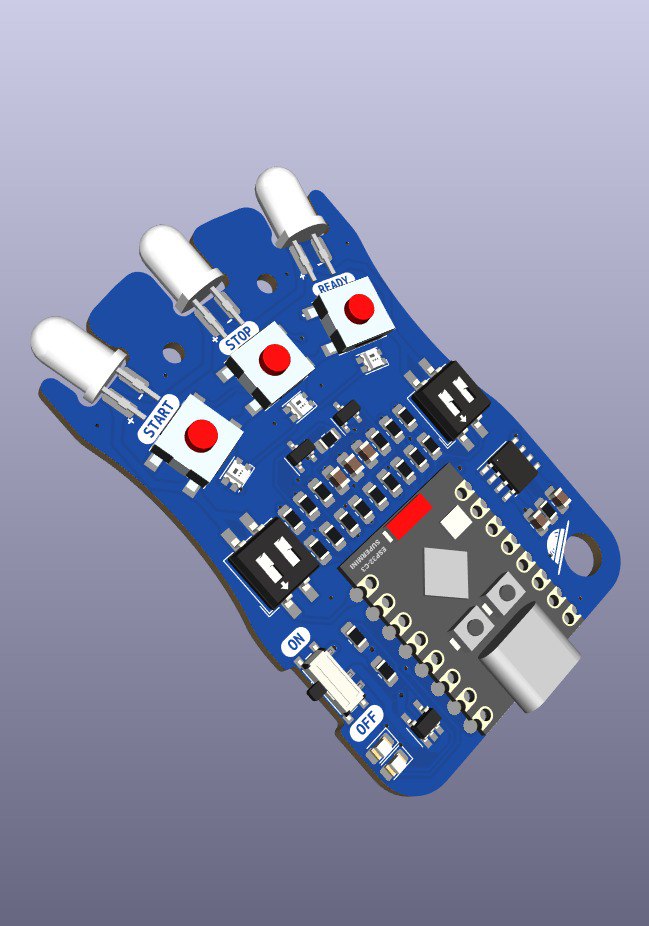
Mando (Remote)
Microcontrolador
| Característica | Detalle |
|---|---|
| Modelo | Seeed XIAO ESP32C3 |
| MCU | ESP32-C3 (RISC-V 32 bits) |
| Frecuencia | 160 MHz |
| Flash | 4 MB |
| RAM | 400 KB SRAM |
| Framework | Arduino (ESP32 Core) |
| Entorno | PlatformIO |
Componentes
| Componente | Modelo / Especificación | Cantidad |
|---|---|---|
| LED IR (alta intensidad) | MOSFET para Start/Stop | 2 |
| LED IR (baja intensidad) | MOSFET para Ready | 1 |
| LED RGB | NeoPixel WS2812B (×3) | 1 tira |
| LED indicador | LED onboard | 1 |
| Botón Start | Pulsador táctil | 1 |
| Botón Stop | Pulsador táctil | 1 |
| Botón Ready | Pulsador táctil | 1 |
| Botón Modo | Pulsador táctil | 1 |
| DIP Switch | 4 posiciones | 1 |
| Interruptor | Encendido principal | 1 |
| Cargador de batería | Módulo carga LiPo 1S | 1 |
| Batería | LiPo 1S 500 mAh | 1 |
Pinout
| Pin | Periférico | Función |
|---|---|---|
| GPIO 8 | LED | LED indicador onboard |
| GPIO 5 | NeoPixel | Tira de 3 LEDs RGB |
| GPIO 2 | BAT_ANALOG | Lectura de batería (definido, sin usar) |
| GPIO 4 | IR_CMD / LEDC Ch.0 | LED IR de comandos (Start/Stop) |
| GPIO 7 | IR_PROG / LEDC Ch.1 | LED IR de programación (Ready) |
| GPIO 21 | BTN_START | Botón de inicio |
| GPIO 20 | BTN_STOP | Botón de parada |
| GPIO 10 | BTN_READY | Botón de preparado |
| GPIO 6 | BTN_MODE | Botón de cambio de modo |
| GPIO 0 | DIP_SW_0 | DIP switch bit 0 (LSB) |
| GPIO 1 | DIP_SW_1 | DIP switch bit 1 |
| GPIO 2 | DIP_SW_2 | DIP switch bit 2 |
| GPIO 3 | DIP_SW_3 | DIP switch bit 3 (MSB) |
Nota: Los pines de los DIP switches usan GPIO 0–3. GPIO 2 está compartido con
BAT_ANALOG, pero la funcionalidad de lectura de batería no está implementada.
LEDs IR y MOSFETs
El mando utiliza dos canales PWM independientes para los LEDs infrarrojos:
| Canal | GPIO | LEDC Ch. | Propósito | Intensidad |
|---|---|---|---|---|
| CMD | GPIO 4 | 0 | Start / Stop | Alta (MOSFET dedicado) |
| PROG | GPIO 7 | 1 | Ready / Programación | Baja (MOSFET dedicado) |
Cada canal se configura con PWM de 10 bits de resolución. La frecuencia portadora varía según el protocolo: 36 kHz para RC5 y 37–40 kHz para NEC y SIRC.
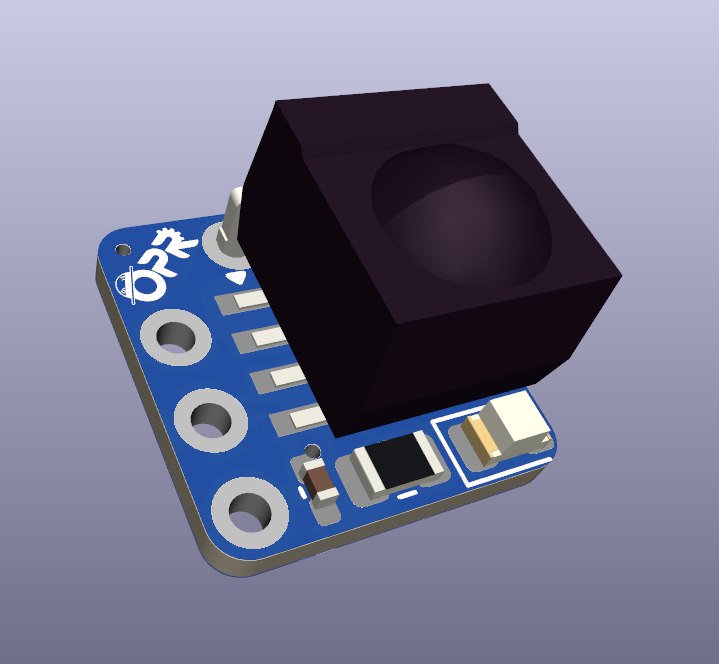
Módulo (Module)
Microcontrolador
| Característica | Detalle |
|---|---|
| Modelo | ATtiny13 / ATtiny85 |
| Arquitectura | AVR 8 bits |
| Frecuencia | 1.2 MHz (default) / 9.6 MHz (internal) |
| Flash | 1 KB (ATtiny13) / 8 KB (ATtiny85) |
| RAM | 64 B (ATtiny13) / 512 B (ATtiny85) |
| EEPROM | 64 B (ATtiny13) / 512 B (ATtiny85) |
| Framework | Arduino (ATTinyCore) |
| Entorno | PlatformIO |
El platformio.ini soporta tanto ATtiny13 como ATtiny85, con entornos
de programación directa y vía ArduinoISP.
Componentes
| Componente | Modelo / Especificación | Cantidad |
|---|---|---|
| Receptor IR | TSOP4838 | 1 |
| LED azul | SMD 0804 | 1 |
| Resistencia | 220 Ω SMD 0804 | 1 |
| Condensador | 104 (100 nF) SMD 0402 | 1 |
Pinout
| Pin | Periférico | Función |
|---|---|---|
| PB0 | PIN_SIGNAL | Salida de señal Start/Stop |
| PB1 | PIN_IR | Receptor IR (TSOP4838) con interrupción CHANGE |
| PB2 | PIN_RESET | Reset de EEPROM (definido, código comentado) |
| PB4 | PIN_LED | LED indicador de estado |
Nota: PB2 (Pin 2) está definido como
PIN_RESETpara restaurar la EEPROM a valores de fábrica, pero tanto la lectura del pin como la funciónrc5_reset_eeprom()están comentadas en el código.
Diseño mecánico
| Característica | Detalle |
|---|---|
| PCB | Diseño personalizado (SMD) |
| Modelo 3D | 3d_model/Module/IRStart - Module.stl |
| STEP | 3d_model/Module/IRStart - Module.step |
| Carcasa Remote | 3d_model/Remote/IRstart - Remote PCB.step |
Diagrama del Sistema
flowchart TD
Remote[ESP32-C3 Mando]
Module[ATtiny13/85 Módulo]
subgraph "Mando (Remote)"
BTN[Start/Stop/Ready/Mode]
DIP[DIP Switch ×4]
NeoPixel[NeoPixel ×3 RGB]
LED_C[LED IR CMD]
LED_P[LED IR PROG]
ESP[ESP32-C3]
BATT[LiPo 1S 500mAh]
BTN --> ESP
DIP --> ESP
ESP --> NeoPixel
ESP --> LED_C
ESP --> LED_P
BATT --> ESP
end
subgraph "Módulo (Module)"
IR_RX[TSOP4838]
ATTINY[ATtiny13/85]
LED_M[LED Azul]
SIGNAL[Señal Start/Stop]
IR_RX -->|CHANGE INT| ATTINY
ATTINY --> LED_M
ATTINY --> SIGNAL
end
LED_C -->|RC5/NEC/SIRC| IR_RX
LED_P -->|RC5 Prog| IR_RX
SIGNAL -->|GPIO| RobotDocumento generado el 2025-06-25. Ver también Arquitectura Software, Protocolos IR.